实现舵机控制
https://blog.csdn.net/zhusongziye/article/details/126731092
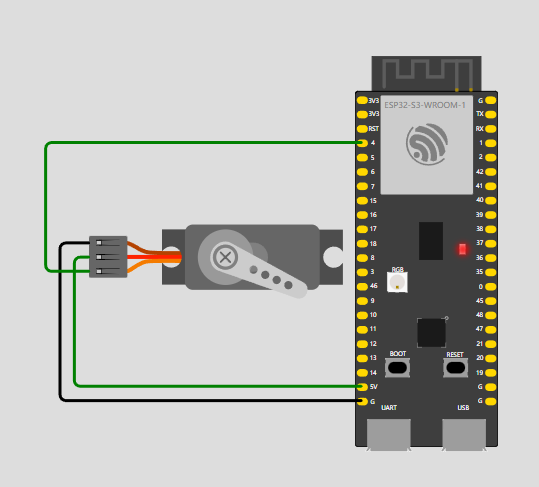
通过 Wokwi 网站使用 micropython 开发 ESR32 开发板,实现舵机控制。
基本使用
python
# Micropython on ESP32 开发板舵机控制演示。舵机初始状态是竖着的。
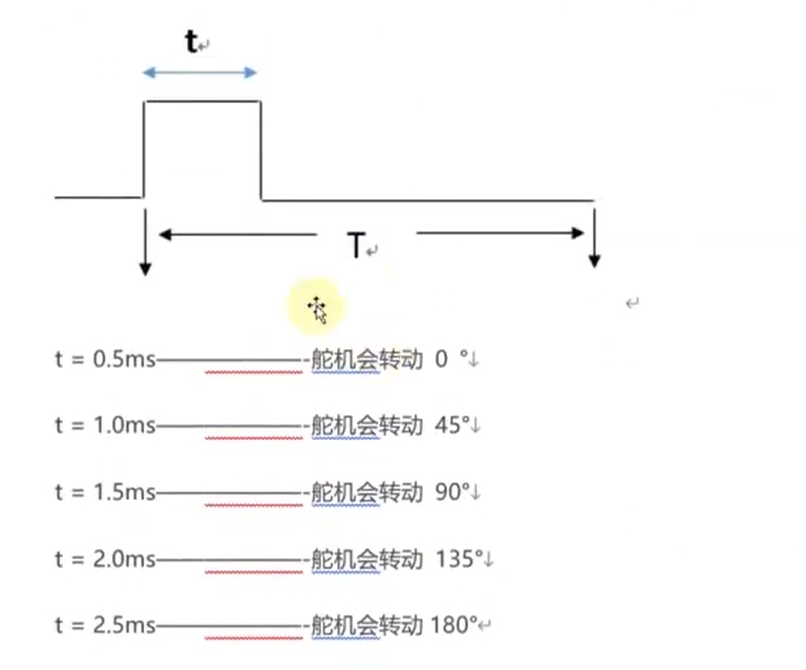
# 舵机的高电平周期对应的角度:
# 0.5ms--------------0度;
# 1.0ms------------45度;
# 1.5ms------------90度;
# 2.0ms-----------135度;
# 2.5ms-----------180度;
from machine import Pin, PWM
import time
# pwm 输出引脚
pwm = PWM(Pin(4, Pin.OUT))
# 设置 pwm 频率
pwm.freq(50)
for pos in range(0, 181): # 从 0 到 180 度转动
print(pos, end=" ")
'''
那么公式为
pos / 180(最大角度) * 2(0°-180°高电平脉冲宽度) + 0.5(舵机角度0°时高电平脉冲宽度)/ 20ms(脉冲周期) * 1023
'''
ts = int((pos / 180 * 2 + 0.5) / 20 * 1023)
# 输出占空比
pwm.duty(ts)
time.sleep(0.05)
print('延时结束')
for pos in range(180, -1, -1): # 从180到0度转动
print(pos, end=" ")
'''
那么公式为
pos / 180(最大角度) * 2(0°-180°高电平脉冲宽度) + 0.5(舵机角度0°时高电平脉冲宽度)/ 20ms(脉冲周期) * 1023
'''
ts = int((pos / 180 * 2 + 0.5) / 20 * 1023)
# 输出占空比
pwm.duty(ts)
time.sleep(0.05)舵机介绍
在此介绍下什么是舵机?舵机是用来干嘛的?和马达有什么区别?

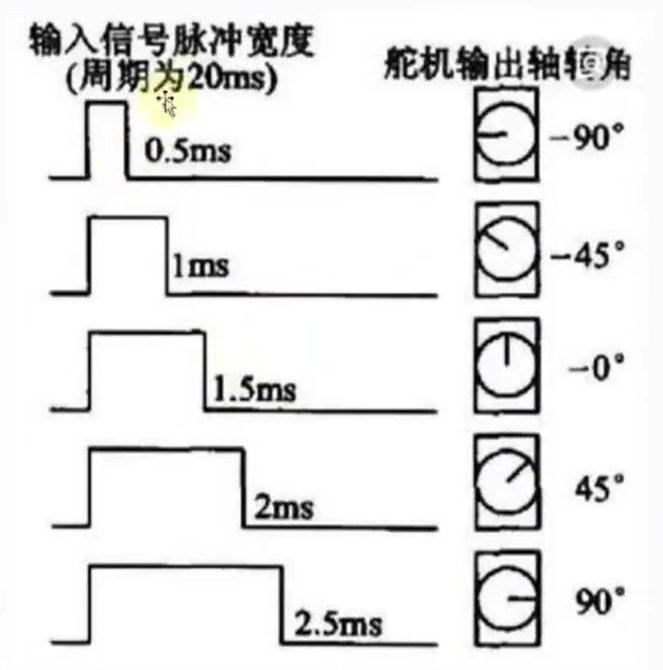
在我们知道t=0.5ms的时候对应的是0度,t=2.5ms的时候对应的是180度,根据这两个参数得到一个二元一次方程(你还记得什么是二元一次方程不?是不是都还给数学老师了):
0x + B = 0.5
180x + B =2.5
我们解这个方程得出:
B=0.5, x=1/90,
角度计算公式:
期望角度angle / 180(最大角度) _ 2(0°-180°高电平脉冲宽度) + 0.5(舵机角度0°时高电平脉冲宽度)/ 20ms(脉冲周期) _ 1023
控制舵机随意设定角度
python
# Micropython on ESP32开发板控制舵机角度
from machine import Pin, PWM
import time
# pwm输出引脚
pwm = PWM(Pin(15), freq=50, duty=0)
def Servo(servo, angle):
# 期望角度angle / 180(最大角度) * 2(0°-180°高电平脉冲宽度) + 0.5(舵机角度0°时高电平脉冲宽度)/ 20ms(脉冲周期) * 1023
pwm.duty(int(((angle) / 180 * 2 + 0.5) / 20 * 1023))
#
Servo(pwm, 0)
time.sleep(1)
#
Servo(pwm, 45)
time.sleep(1)
#
Servo(pwm, 90)
time.sleep(1)
#
Servo(pwm, 135)
time.sleep(1)
#
Servo(pwm, 180)
time.sleep(1)